Bottle Palletiser System — Robotic Bottle Palletising with Layer Pads
Fast, repeatable palletising of bottles into stable layers with optional layer pads and automatic pallet handling.
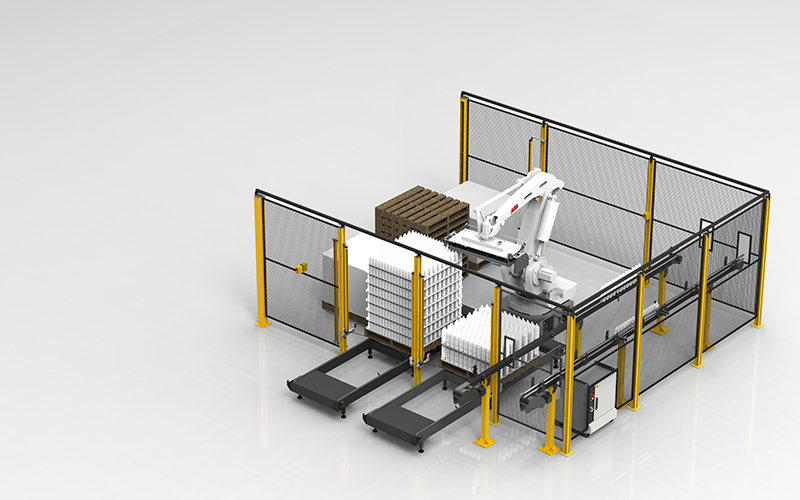
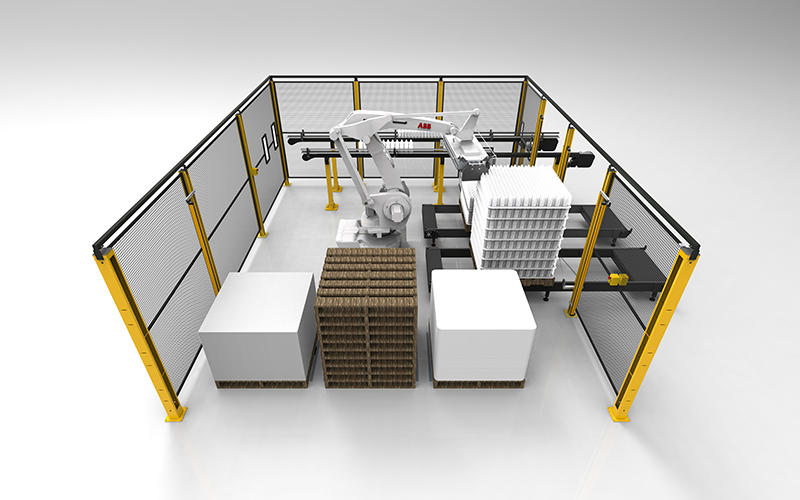
Using an ABB robot and Mexx vacuum end-effector, the system picks bottles from conveyor and builds one or two pallets, ready for downstream strapping, wrapping, and dispatch.
What the Bottle Palletiser does
The Bottle Palletiser System takes a continuous stream of bottles and builds consistent pallet loads. Bottles arrive via conveyor, are picked in rows (or configured groups), and placed onto the pallet in a controlled pattern. When a layer is complete, the system can place a layer pad, then repeats until the pallet reaches the target stack height.
In plain terms: it turns “a river of bottles” into “a neat pallet of order”.
Common system architectures
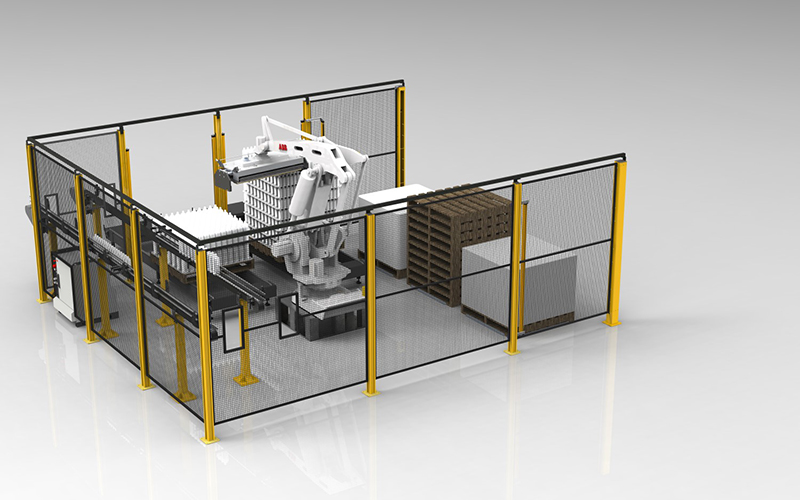
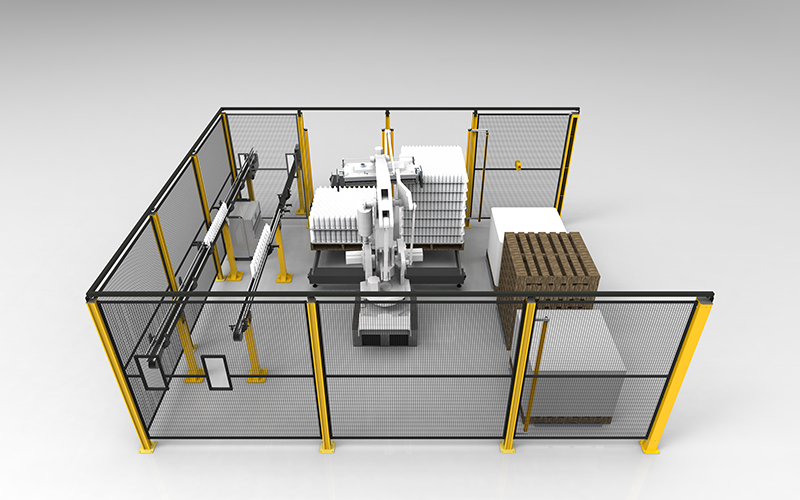
- Single pallet build station (compact, simple )
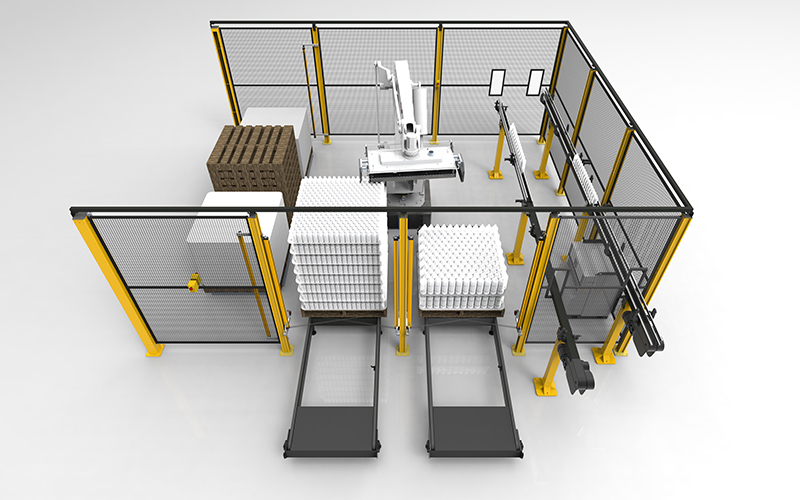
- Dual pallet build stations (continuous operation while pallets change out)
- Upstream debagging + palletising cell (bags-to-pallet workflow)
- Pallet outfeed + strapping/wrapping handoff
How it works (process)
- Infeed & accumulation: bottles arrive from upstream equipment via conveyor, with controlled flow to the pick point.
- Robot picking: the ABB robot uses the Mexx vacuum head to pick a configured group of bottles from the conveyor.
- Layer building: bottles are placed onto the pallet using a defined pattern to maintain stability and pack quality.
- Layer pad placement (optional): when a layer is complete, the robot places a layer pad before starting the next layer.
- Pallet changeover / outfeed: full pallets are released to outfeed for forklift, conveyor transfer, or AGV pickup (site dependent).
- Safety control: safety devices (e.g., light curtains/muting where required) allow pallet movement while maintaining safe robot operation.
Key features
- Robotic bottle palletising for consistent layer builds
- Central control via HMI for recipes, patterns, and changeovers
- ABB robot + Mexx vacuum end-effector designed for a wide bottle range
- Single or dual pallet build stations (configuration dependent)
- Automatic pallet outfeed options for improved throughput and safer handling
- Layer pad handling — Optional (pickup, placement, and pad magazine integration)
- Integration-ready: interfaces with debagging, conveyors, inspection, and plant pallet logistics
- Safety-first design: guarding and interlocks engineered to meet applicable AU/NZ requirements and site risk assessments
i[email protected]
(07) 5571 5733
Unit2, 28 Harrington Street, Arundel. 4214, Australia


