Bottle Palletising System
Project Overview
Mexx engineered an automated HDPE bottle de-bagging and conveying plant for a high-throughput packaging environment, designed to take palletised bags of empty bottles and deliver a controlled, continuous bottle supply through inspection, transfer, rinsing, and downstream filling operations. The system combined robotic de-bagging, bottle orientation control, vision inspection, side-grip transfer, hygienic conveying, and bottle metering within one coordinated production architecture.
Rather than treating de-bagging, bottle transfer, inspection, and filler-room supply as separate equipment packages, the project required an integrated line approach. Mechanical handling, robotics, conveyor design, controls, inspection systems, and hygienic transfer between process zones all had to work together to maintain bottle flow, minimise disturbance, and support reliable downstream production.
Engineering Challenge
Empty plastic bottles are light, unstable, and difficult to handle at speed without creating jams, loss of orientation, product damage, or inconsistent feed into downstream equipment. This project needed to manage multiple HDPE bottle formats ranging from 300 mL to 3 L, while supplying nominal line rates of up to 200 bottles per minute depending on bottle type, with additional speed allowance for gap closing and recovery.
The challenge extended beyond simply removing bottles from bags. The system had to de-bag both square and round bottle groups, maintain orientation, reject fallen or incorrect bottles, combine flow from independent de-bagging streams, transfer bottles from the debagging hall into the filler room, invert and air-rinse them, and meter them into downstream labelling and filling equipment. This required a robust automation solution designed for real production conditions, not a standalone machine performing one isolated task.
Projects of this nature demand careful integration between:
- Robotic bag handling
- Bottle orientation control
- Material handling
- Vision inspection and reject
- Hygienic bottle handling
- Bottle metering and flow control
- Automation and interlocks
- Safety zoning and guarding
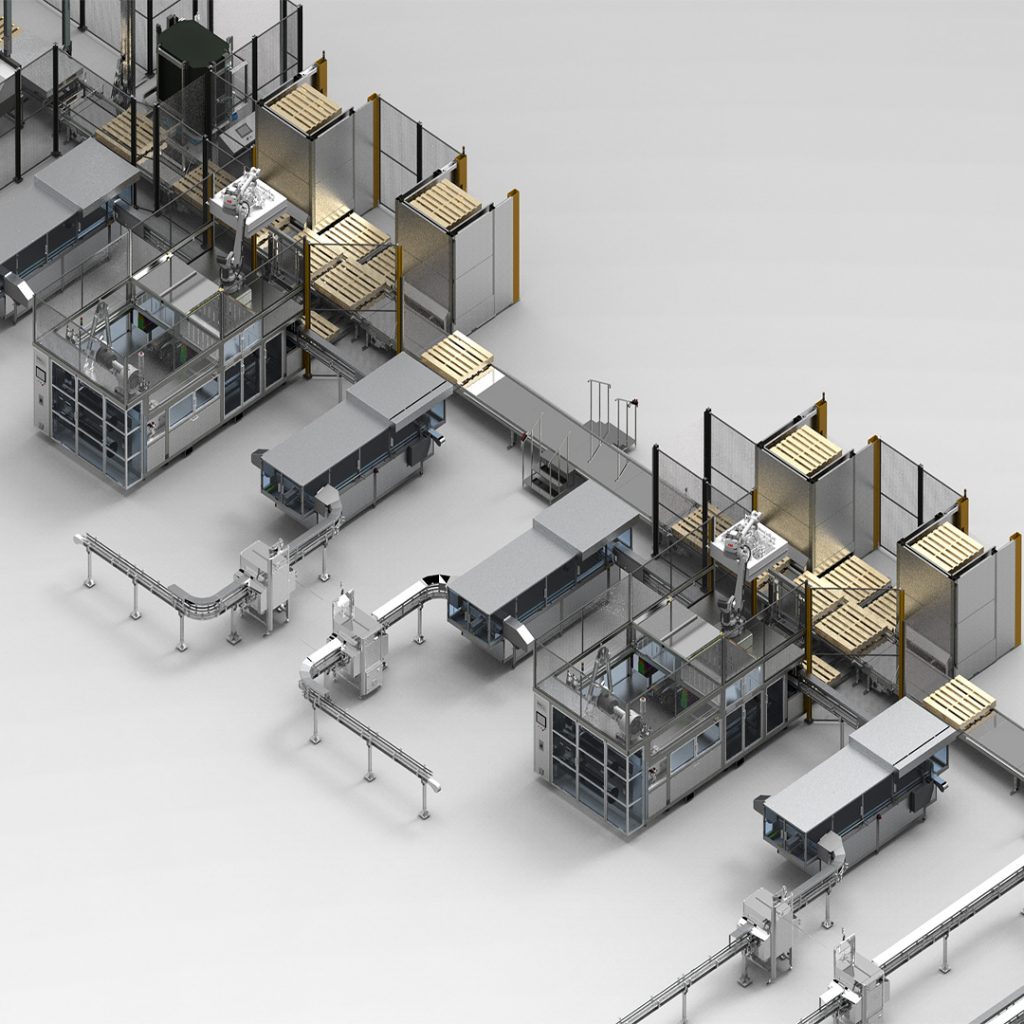

System Architecture
The automated bottle handling plant integrates several functional stages within a single conveying and supply architecture:
- Pallet drop-off and bag presentation to automated de-bagging cells
- High speed ceiling mounted conveyor feed system with automatic adjusted guide rails.
- Proprietary software algorithms to control minimum gaps and maintain minimal back pressure.
- Robotic picking of bottle bags from pallet locations
- Automated bottle removal from full-size and half-size bags
- Layer pad de-palletising and bulk layer-pad stacking
- Bottle indexing onto accumulation tables while maintaining orientation
- Robotic vacuum transfer of bottle groups onto fast-moving feed conveyors
- Merging of bottles from independent de-bagging tables into one continuous flow
- Vision-based inspection for bottle defects, fallen bottles, and orientation
- Side-grip elevation from the low-pressure debagging hall into the high-pressure filler room
- Side-grip inversion and air-rinsing before downstream processing
- Floor-level bottle conveying and metering into labelling and filling equipment
- Label and date-code verification with reject capability
The design allowed unstable empty bottles to move from palletised bagged supply into a continuous, inspected, oriented, and controlled bottle stream suitable for downstream packaging operations.
Production Requirements
The system was developed to support high-availability bottle supply, with the proposal targeting OEE of at least 90 percent and bottle handling across several HDPE formats. Bottle sizes included 3 L, 2 L, 1 L, 500 mL, and 300 mL containers, with nominal speed requirements ranging from 100 to 200 bottles per minute depending on format. The design also included additional speed control to help close gaps near the filler and recover flow disturbances.
To support that performance, the plant used two independent de-bagging systems working in parallel so that bottle supply could remain continuous while reducing the risk of interruption from any handling point. Timing of bottle release was controlled so bottle groups could merge behind each other with preset gaps, helping stabilise downstream line flow.
Automation Approach
The auto de-bagging section was built around two independent de-baggers, each fed from pallet locations with automatic bag-squaring capability. ABB robots picked bottle bags from pallet positions and placed them into debagging stations, where bottles were removed automatically and passed onto accumulation and transfer systems. Fallen bottles were automatically rejected, and each debagging table, accumulation table, and bottle feed robot worked independently to improve redundancy and reduce supply risk.
The conveying and transfer sections extended well beyond simple floor-level transport. Bottles moved onto vacuum feed conveyors, through inspection, up a side-grip elevator into the filler room, through a side-grip inverter air-rinser, and onto floor-level conveyors with bottle metering control feeding downstream equipment. Automatic self-centring guide rail adjustment, stainless steel conveyor construction, and hygienic transfer design were used throughout the system to suit food and dairy production conditions.
Vision systems also formed a key part of the plant architecture. The proposal included high-resolution camera inspection for overall bottle defect detection and orientation, plus inspection for bottle label position, presence, correct label, correct orientation, and date code verification with bottle rejection. This brought mechanical handling, robotics, inspection, and controls together into one integrated production system.
Mexx Engineering Delivery Method
Complex bottle handling and conveying systems require disciplined engineering governance. Where robotics, inspection, hygienic transfer, packaging-line integration, and continuous supply requirements are all involved, the outcome depends on system architecture and integration quality as much as the equipment itself. That broader delivery approach is consistent with the engineering-led structure already established across the Mexx website.
Mexx delivers projects using a structured stage-gate approach aligned with recognised project management principles. Each stage focuses on reducing uncertainty, resolving integration issues, and retiring technical risk before capital and installation commitments escalate. This is especially important in packaging and process environments where upstream instability can quickly create downstream production losses.
Typical Stages Include:
- Concept definition and line architecture
- Throughput and handling assessment
- Safety and risk identification
- Detailed mechanical and controls design
- Vision and automation integration planning
- Manufacturing and assembly
- Factory acceptance testing
- Installation and commissioning support
This structured approach helps reduce late-stage redesign, improves coordination across disciplines, and gives clients greater delivery confidence for complex automated handling and packaging systems.
Disciplines Involved
Projects of this scale require collaboration across multiple engineering domains.
- Mechanical engineering
- Automation and controls
- Robotics integration
- Vision systems
- Conveyor and bottle handling design
- Hygienic process transfer
- Safety systems and guarding
- Commissioning and operational support
Discuss a Similar Project
Mexx specialises in integrated production, handling, and automation systems for industries where throughput, product stability, inspection, and downstream coordination all matter. Projects like this demonstrate how robotics, conveying, and machine vision can be combined to turn unstable incoming product supply into a controlled and reliable production flow.
If you are planning a bottle handling, conveying, inspection, or packaging-line integration project, Mexx can assist with early-stage concept development, system architecture, feasibility definition, and delivery planning.